GPS for Projectiles
참고자료
fairfax-projectile positioning.pdf (ARL-TR-5994)
[GPS Reception on Projectiles]
• High
seed: 1000m/s -> 5kHz Doppler shift @ 1.5GHz
• High
spin: 200rps -> 500Hz
Doppler, 100º phase shift @ 1.5GHz. Performance qualification
at high spinning test fixture. Mayflower GPS receiver and anti-jam unit in
high-spin performance test.

•
"Time keeping is essential to GPS; however, the associated jerk
encountered at launch by the projectile causes clock drift."[Fairfax]
•
"Short time of flight limits filter settling time, in-flight calibration,
and GPS acquisition."[Fairfax]
•
"GPS may be lost in flight due to terrain or jamming." [Fairfax]
[GPS Receiver Operational Sequences]
1)
Initialization: from the external reference gun GPS receiver and the local
mission fire control station.
- Data
transfer for hot start.
- GPS
time for direct Y-code acquisition, power-on for initialization, initialization
data, almanac and precise ephemeris for all SVs in
view, SAASM and cryptographic keys, the gun position,
target coordinate, calibration of the projector GPS reference oscillator,
reference trajectory and velocity aiding data. The receiver clock is set to
within 10ms (10us) of GPS
Time (the smaller, the faster the acquisition)
- Maintain
the initialization data accurately.
-
Initialization time: minimized for high rate of fire. < 3s.
2) Hold
-
Initialization power is removed and the GPS receiver is powered by the time
maintenance power.
- Hold
time (time maintenance interval): time from initialization to firing. a few seconds to 20min., the ref. osc. accuracy is crucial in
maintaining GPS time accuracy. GPS receiver maintains initialization data set,
the keys, and GPS time.
3)
Firing and acquisition
- On
firing, the main battery powers the GPS receiver.
-
Power-up self-test is done.
- The
receiver starts to capture GPS signals.
4) Fast
Acquisition
- Limit
the 2D search space (time = code, frequency =
carrier) with hot start (initialization).
- Time
search: code correlation matching
-
Frequency search: for carrier phase reference (a replica of carrier phase and
phase rate of the received signal) to successfully phase-demodulate the GPS
signal. A variation of phase-locked loop called Costas loop is used. Acceptable
error is about equal to the Costas loop bandwidth (less than 10Hz).
-
Minimize frequency uncertainty: primary contribution
-
Frequency uncertainty: accuracy of reference oscillator + Doppler shift caused
by projectile movement (linear movement (5kHz)
and spin (0.5kHz))
- Receiver's
reference oscillator's frequency accuracy is very critical: reduces both time
and frequency search space.
- Gun
shock-induced frequency shift (the largest contributor) of the reference
oscillator is accurately calibrated: removes the
crystal aging
and temperature-induced drift. Calibration is done during initialization using
GPS Time.
- Use
the accurately calculated projectile trajectory versus time for Doppler
frequency fix (frequency fix): use all available
initialization
data - gun position, firing azimuth and elevation, muzzle velocity, drag,
planned flight trajectory, elapsed time since firing to estimate the projectile
velocity.
-
Minimize time uncertainty:
Use accurate projectile position.
Calibrate out the receiver clock bias to
GPS time: within 10ms at
initialization.
The receiver clock uncertainty at
start-of-acquisition is the product of the receiver oscillator frequency
uncertainty and the time maintenance interval (up to 20 minutes). The frequency
stability of the receiver oscillator over this interval is a major factor in
minimizing acquisition time since it affects both time and frequency
uncertainties. The primary contributor to oscillator drift is changes in
temperature. The receiver is equipped with a temperature sensor. Sensed changes
in temperature are used to compensate the time keeping for known oscillator
drift characteristics.
- Fast
correlation:
Use the best current
estimate of projectile position, projectile velocity, receiver clock bias, and
oscillator frequency.
Use massive parallel
correlation: use a large number of correlators.
100,000 effective correlators
Acquire 1st SV and use the information from it to reduce time and
frequency uncertainty in subsequent SV acquisition.
- Use
many channels (more than 6).
- Realize
the highest SNR:
Minimize the hardware
and software implementation losses: noise figure, filter loss, sampling loss,
image rejection, signal aliasing, rejection of in-band spurious responses.
Limit noise: minimize
RF input bandwidth and tracking loop bandwidth
-
Fastest possible acquisition in the presence of jammers close to the flight
path.
5)
Independent L1 and L2
reception
6)
Anti-jamming
-
Jamming effect: reduction of SNR
- Retain
the best SNR: minimum implementation loss, noise
figure, filter losses, sampling losses, image rejection, signal
aliasing. Down conversion frequency plan free of in-band spurious responses.
- Jammer
sensor suite: jammer signal level and bandwidth. On board the GPS receiver.
- Optimally
adjust receiver parameters: coherent/non-coherent detection integration
intervals, tacking loop bandwidth, signal sampling weights and spacing.
- Use
antenna beam switching/nulling: use multiple antenna
configurations.
-
Separate L1 and L2 tracking
channels: do not use the same down converter and multiplex it between L1 and L2. SNR loss proportional to the dwell
ratios with commensurate loss in tracking threshold. increased
likelihood of carrier cycle slip or drop clock.
-
Omni-directional antenna: limited anti-jam performance, poor sky/ground signal
separation (jamming from ground)
7) Using
IMU measurements to aid GPS
- IMU derived projectile dynamics → used in GPS to limit
search space. Used to reduce the bandwidth of the tracking
loop. Improved S/N and reduced acquisition time → stronger anti-jamming
performance.
- IMU data available quite a moment after firing: IMU depends on GPS to align itself in flight.
- IMU data latency: conversion time of raw inertial IMU data into satellite line-of-sight range, range rate and
range acceleration. held less than 20ms.
8) SAASM (Selective Availability Anti-Spoofing Module)
-
Mandatory in battle field operation.
- Use a
dedicated ASIC chip: 40mmx40mm
MCM package.
- GPS
receiver output is routed to SAASM chip input. Output
of SAASM chip is SV
navigation message.
-
Construction: GPS ASIC with 12 tracking channels each
capable of tracking L1 or L2,
C/A or P/Y-code, acquisition correlator ASIC, key data processor chip set, flash memory for DSP program storage.
10)
Antenna switching: antenna with a null in the forward direction -> good for
anti-jam capability antenna with an omni-directional
pattern -> good for capturing many GPS signals.
11) High
spinning projectile environment
-
General receiver could find the fix only at low spin (< 6Hz).
Spinning causes amplitude and phase modulation of received GPS signal. High
spinning causes the satellites unlocked. Once unlocked the receiver should
reacquire the satellite in a very short time which decreases with the spin
rate.
- The
following are remedies.
Projectile de-spinning
Antenna switching
Amplitude
and/or phase tracking of modulation caused by spinning [Xiao, Int. Conf. Mechtron. Automat., IEEE, Agu.
2007], [Doty, GPS World, Sept. 2004].
Use rotation
demodulator: one antenna + one receiver, multiple antennas + corresponding
receivers for each antenna
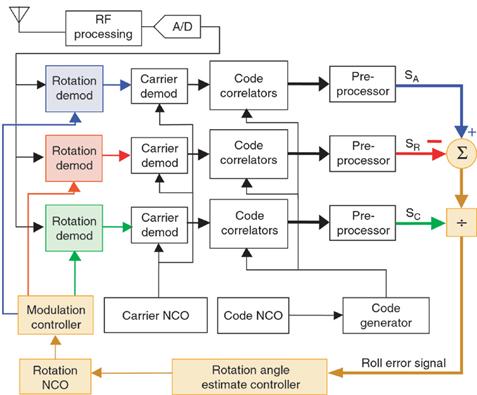
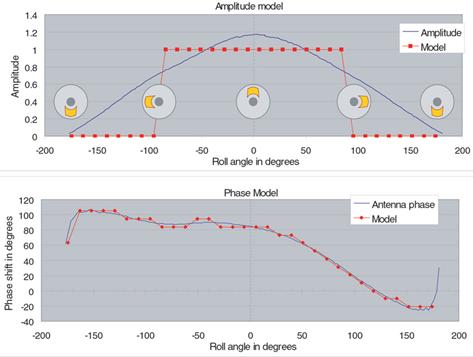
Actual amplitude & phase of rotating
antenna (blue), amplitude and phase of rotation demodulator output
Spin fixture: for live testing of GPS
reception on high-spin
GPS receivers with high-dynamic/spin
capabilities are specially developed:
- Rockwell-Collin ASVN(Advanced
Spinning-Vehicle Navigation) development team
- Mayflower Communications, L3 IEC, BAE Systems 'NavComp'
12)
GPS-derived projectile spin measurement:
- Rotational orientation (attitude) of a
fast spinning body is required for correcting the effect of spinning body in
the sensor inputs and guidance actuator controls.
- Because the inertial sensors are
spinning collectively with the projectile, they must be demodulated to remove
rotational artifacts to that Coriolis and lateral
acceleration components can be utilized in the trajectory solution.
13)
Telemetry: during test firings only and not used in operational rounds since
emitting RF signal is dangerous in battle field.
14)
Packaging:
- Form
factor that fits into projectile nosecone.
-
Initialization coupler, GPS antennas, IMU, guidance
computer, batteries, power regulator, GPS receiver, telemetry and its antenna
(test model)
[GPS Antenna for Projectile Applications]
•
Coverage requirements: 70-90% coverage of upper hemisphere irrespective of the
projectile orientation
•
Multiple antenna method
- Place more than one antenna along the
projectile circumference.
- 81mm: 2
antennas, 155mm: 3 antennas
- Non-uniform weighing is required
because of overlapping patterns of individual antennas [Svendsen,
JNC]
[GPS Anti-Jam]
• Basics
-
Wideband jamming, narrow band jamming
-
Jamming rejection: 20-30dB
-
Antenna switching and nulling: adaptive spatial
filtering, digital adaptive array
-
Adaptive temporal filtering (ATF) by Mayflower Comm.
-
Digital spatial temporal adaptive processing (STAP)
by Mayflower Comm., miniature GPS array, excellent nulling performances
•
Mayflower Comm.: research from late 1980's, RF ASIC chip BeaconTM.
For C/A and P(Y) codes, based on ATF, ASF and STAP algorithms, gun-hardened to 20kg,
high dynamic operation optimized for high-speed spinning applications,
RF/digital interface to GPS receiver, up to 4 antenna elements, 80mm, protection against multiple jammers of different
kinds
[Military GPS Receivers]
Common technical features:
- PPS(precise
pos. serv.) units(P-code): exportable only to GPS Memorandum of Understanding
Countries
- PPS security module (Y-code): obtained
through Foreign Military Sales(FMS) procurement
- Freq.: L1 C/A
and P or Y, L2 P or Y
- Greater accuracy with 24 channels.
- Dynamics > 10g
Direct P(Y)-code acquisition:
- GPS P-code: more accurate positioning,
higher tolerance to broadband and CW jamming
- GPS Y-code: used in place of the P-code
when the anti-spoofing mode of operation is enabled.
- Accurate time transfer to the receiver
(initialization), time maintenance using a stable oscillator, massively parallel correlator
- Small time error: leads to large code
search space
- 32,000 time-frequency bins in parallel
- Operational conditions: acquisition
probability 0.9, initial time error ±1ms, initial
frequency error ±0.2ppm, J/S 50dB,
20.46MHz signal bandwidth
- Merits of direction acquisition of
Y-code: higher tolerance to broadband and CW jamming
- Code search resolution cell (code phase
search): 1/2 PN chip. In the worst case, all the
resolution cells in the entire uncertainty region must be tested before the
signal is detected. Statistically half of the total number of resolutions cells
must be tested. 511 resolution cells in time are tested in parallel. Code phase
search is same as shifting the phase of the replica PRN code generated by the
receiver until it correlates with the received satellite PRN code.
- Frequency search resolution cell
(carrier phase search): reciprocal of the coherent integration period, use FFT to extend 511-time resolution cells to 64-frequency
resolution cells. 511x64 = 32704 time-frequency resolution cells. Carrier phase
search is same as changing the receiver frequency until it correlates with the
received satellite carrier frequency plus Doppler.
Military GPS receiver products:
• STS
Y-Express: direct P-code reception using 511 time resolution (by correlator) and 64 frequency resolution cells (by FFT) resulting in parallel
processing of 32704 time-frequency resolution cells. P-code is decoded in less
than 250s with ±1ms timing
uncertainty and ±0.2ppm frequency uncertainty. [wolfert-sts-yexpress.pdf, li-p-code acquisition.pdf]
•
Rockwell-Collins NavStorm Artillery G-Hardened GPS
Anti-Jam System: 12-ch., artillery, enhanced direct
Y-code acquisition/cold start, SAASM, high-rate
aiding, 80-90dB J/S performance scalable anti-jam, up
to 4 RF signal inputs, single(L1 or L2) or dual (L1 & L2) freq. tracking, high-g vib.
& shock, field clock recalibration for extended storage, 6000 correlators with Panther ASIC,
high anti-jamming immunity, antenna masking selection, precision time transfer,
simultaneous ionospheric correction, carrier loop
aiding(in future upgrade), carrier phase measurement output, fast initial
acquisition, extended range correlation(in future upgrade); TTFF
= 77s cold start w/o initialization data, < 25s with time uncertainty less than 25ms,
< 8s with time uncertainty less than 10us; designed for high-g shock; used in ERGM RR, CMATD, Team STAR, LCCCM
•
Rockwell-Collins NavStrike 3.3 Munitions Receiver:
12-ch., JDAM, enhanced
direct Y-code acquisition/cold start, 5th generation SAASM,
single(L1 or L2) or dual (L1 & L2) freq. tracking, high-g vib.
& shock, field clock recalibration for extended storage, 6000 correlators with Panther ASIC,
high anti-jamming immunity, antenna masking selection, precision time transfer,
simultaneous ionospheric correction, carrier loop
aiding(in future upgrade), carrier phase measurement output, fast initial
acquisition, extended range correlation(in future upgrade); TTFF
= 77s cold start w/o initialization data, < 25s with time uncertainty less than 25ms,
< 8s with time uncertainty less than 10us; Shock 386g
• Mayflower Gun-Hard C/A Code GPS Receiver: 12-ch., embedded data link, embedded anti-jam with Mayflower
patented ATF technology, digital/RF interface to Mayflower anti-jam solution,
gun-hardened at 20,000g, interface to passive antenna
arrays (up to 4 elements), 10mCEP, size 40mm dia., TTFF = 15s(hot),
38s(warm), 50s(cold), hot
start TTFF tested in high-speed spinning
applications, used in GIF and BTERM II
• Mayflower NavAssureTM
100 SAASM GPS Receiver: L1
and L2, 12-ch., up to 4
antennas, 20kg gun hardened, 40mm
dia.
• IEC (L-3 Comm. subsidiary) TruTrak
Evolution (TTE) GPS receiver
- Anti-jamming: 4s
acquisition at 55dB J/S, track at 65dB
J/S and at 90dB J/S with optional FaSTAP(with Deep Integration
with IMU)
- Accuracy: 3m(1 sigma) pseudorange, 0.025m (1s) delta range
- TTFF: <6s (direct Y, hot start, no jamming), <5s (reacquisition)
- Navigation: unfiltered GPS-only least
squares, deeply integrated Kalman filter, IMU-less attitude determination
- Hardware: 24-ch.,
L1 C/A, L1 & L2 P(Y), 4 embedded processors, synchronization on pulses,
0-100,000ft altitude, 20kg 16ms gun setback, 5kg 1ms lateral balloting
- Dynamics: <1200m/s
velocity, < 10g acceleration
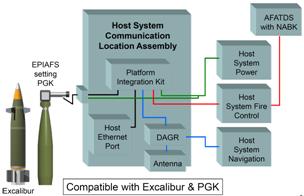
- Used in PGK
and Excalibur.
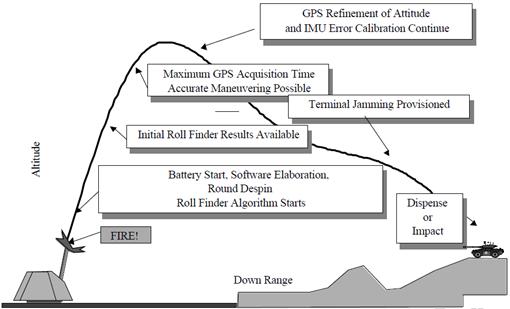
Projectie acceleration:
GPS acquisition window:
ECF(European Correcting Fuze), CCF(Course
Correction Fuze):
• BAE
Systems
• 2 drag
brakes = range correction, spin brakes = reduce spin to reduce the yaw of
repose. → range and deflection control
1D course
correction
• M549A1
• GPS
C/A receiver
• Antenna:
revolution symmetric radiation pattern
TopGun:
IAI, Eurosatory Symposium & Exhibition in Paris
June 14th-18th 2010
GPS/INS 2D course correction, 4 fins
Compatible
with 2" thread well 155mm artillery projectile
20m CEP for all ranges
PGK(Precision Guidance Kit), M1156
burke(2010)-pgk overview.pdf
• US
Army, ATK
•
Screw-on fuze replacement, $3000 low-rate initial
production
• 50m CEP (initial), 30m CEP (final)
• 155mm howitzer fired, later applied to 105mm
system also(2008), IOC at FY12
• 150-275Hz spin, 330-830m/s speed, 20kg setback, 6-27km range
• Deep fuze well:
• No battery: generates its own power
• 2-D GPS SAASM guidance
• Fixed canard guidance: ATK
• Inductive mission setting: EPIAFS
• Rockwell Collins GPS receiver
• Draper Labs IMU

• Antenna cylinder: dia 62mm, h 45mm, patch: 31*31mm, single antenna
• Unit cost: 3000불 이하
• 수출: 호주 2013.8 약 4000발 및 부대장지, 5800만불(660억원, 발당 1650만원)

• IEC (L-3 Comm. subsidiary) TruTrak
Evolution (TTE) GPS receiver
- Size: 1.75"x2.45", 3.07"x0.93",
2.45"x2.45" for various projectile
applications
- Low
power consumption: 3W @ highest performance mode, 0.7W @ low power mode, 20mW @
standby mode
-
Anti-jamming: 4s acquisition at 55dB
J/S, track at 65dB J/S and at 90dB
J/S with optional FaSTAP(with Deep Integration with IMU)
-
Accuracy: 3m(1 sigma) pseudorange, 0.025m (1s) delta range
- TTFF: <6s (direct Y, hot
start, no jamming), <5s (reacquisition)
-
Navigation: unfiltered GPS-only least squares, deeply integrated Kalman filter, IMU-less attitude
determination
-
Hardware: 24-ch., L1 C/A, L1 & L2 P(Y), 4 embedded
processors, synchronization on pulses, 0-100,000ft
altitude, 20kg 16ms gun
setback, 5kg 1ms lateral
balloting, SAASM
-
Dynamics: <1200m/s velocity, < 10g acceleration
- Used
in Excalibur also.

MGK(Mortar Guidance Kit):
• US
Army, ATK
• 120mm mortar:
VAPP(Very Affordable Precision Projectile:
• US
Army
• Lower
the cost of guided munitions by 10 times. Use low-cost guidance solution. Use COTS(commercial-off-the-shelf) components.
•
Retrofitting existing munitions: reduced cost but limited performance due to
the narrowed design space.
•
Conventional maneuver mechanisms (servomotor-driven fins = carnards)
do not have the frequency response to actuate at high spin rates (hundreds of rps).
• Main
development considerations: precision, range, angle-of-fall, cost
• System
features: rolling and fin-stabilized airframe, single-axis maneuver mechanism,
ballistic-based guidance and flight control
• System
parameters:
1) Roll
rate = 5-30Hz (fin-stabilized)(for simplified and
cost-reduced maneuver mechanism, use slipping band obturator
for disengagement from gun rifling, and tail fiins depolyed after launch and generating appropriate
aerodynamic center of pressure location),
2) GNC(guidance, navigation and control) = GPS receiver and
antenna (position, velocity, time, roll orientation with a discrete pulse
generated when the GPS antenna is oriented toward the earth), guidance and
flight control algorithm, maneuver system, axial accelerometer for initiation
of GNC at launch, telemetry transmitter and antenna
for obtaining data during flight.
4)
Guidance and flight control: use GPS data, with reference to up pulse
(=maneuver direction), canard amplitude and phase wrt
up pulse, impact point calculation using a closed-form flight dynamic model of
projectile airframe and GPS-supplied position and velocity, trajectory shaping
in glide and endgame phases of the trajectory, rotate canards by desired
positive and negative angles during one roll cycle. Active damping based on
expensive IMU is not used.
5)
Airframe: 105/120/155mm, interior
ballistics(projectile weight, chamber volume, muzzle velocity, roll rate,
propellant), sub-system packaging, aeroballistics (wind tunnel experiments, CFD predictions, free-flight experiments, aerodynamic
behavior prediction, flight stability, six degree-of-freedom Monte Carlo flight
simulations with such parameters as physical properties, aerodynamics, launch
conditions, and atmospheric conditions), structural integrity, a classic
multi-disciplinary design problem with competing requirements, compact GNC(size, weight, battery power) to provide more space for
warhead or rocket motor.
6) Gun
hardening: electrical and mechanical components' survival through gun launch
environment, FEM modeling, extensive structural dynamics simulation, verified
through state-of-the-art soft-catch and ground-truth data acquisition-based gun
firings, ensured structural integrity
7) GPS: L3 IEC, SAASM-enabled,
gun-hardened, direct acquisition of encrypted Y-code, RHCP
patch antenna, integration of antenna with GPS receiver, have to cope with
reduced signal level of Y-code, active beam-forming not applicable, use
shielding for EMI effects on antenna and RF front-end, assess GPS performance
for projectile trajectories, Monte Carlo simulation of the receiver with the
GPS simulator gives GPS errors and the Kalman filter
gains to be tuned for specific maneuverability. field
test = to confirm navigation and up-finding (finding sky direction) + mounted
to cantilevered roll drive to check the GPS estimate of roll angle.
8)
Performance evaluation on rolling platform: check GPS performance and canards
deflections throughout a roll cycle, use high-speed camera.
9) IMU: not used to reduce the cost.
10)
Maneuver system: single-axis maneuver control, phasing of the canard
deflections wrt roll orientation permits maneuvers in
any direction, used DSP with feedback, 2-4 canards on
projectile head, tail fins for maintaining roll rate, wind tunnel experiments,
test firing, range can be adjusted ±30% by maneuvering.
11)
Hardware-in-the-loop experiment: maneuver system, guidance and control
algorithm, GPS and telemetry are fully integrated.
12) Test
Firing: guide-to-hit flight experiments, 120mm mortar
fired in Mar. 2010 at the Aberdeen Proving Ground. 155mm
in July 2010.

-120mm mortar: 62-deg quadrant elevation with muzzle velocity
233m/s, target at 3.8km,
downrange(X) and crossrange(Y) error converge to
zero. max. trajectory height 1.5km, projectile landed with 10m
from target.
-155mm artillery: 50-deg. quad. elevation
with muzzle velocity 696ms/, target at 16.4km, projectile landed within 1m
of target.
Mk 64:


ERGM(Extended Range Guided Munition, XM171:
• US
Navy, 5" gun-fired, 15-60nm range, 127mm dia. 1.55m length, 50kg, 10m CEP
•
Roll-stabilized, fin-stabilized glide
• GPS
antenna: 2 units on the skin.
• DCI(Digital
Communication Interface): for initialization, two-way serial communication,
dual coil design, provides power to GPS receiver
- Power:
20kHz 50% duty, 80W
- Data: 500kHz Manchester encoded data, CRC except crypto, 0.02% BER

• GPS
receiver: L3 IEC TruTrack receiver.